
Интеллектуальный четвероногий робот


Введение
Обновление алгоритма: более гибкие и маневренные движения.
Развивайте способность преодолевать препятствия и выполнять сложные движения.
1. Умеет перепрыгивать через траншеи, высоко прыгать, выполнять сальто вперед и другие сложные трюки.
2. Преодолеть ступеньки высотой 15 см, что является почти максимальной высотой, достижимой для четвероногих роботов того же размера.
3. Поддержка выполнения сальто назад, поворотов тела, прыжков с поворотом, махания рукой, лунной походки, переворотов и подъемов и т. д.
Масштабируемая эволюция
Модульная конструкция для безграничного расширения
Возможность передвижения с грузом весом 1,45 кг значительно расширяет пространство для маневрирования.
2. Предоставить интерфейсы разработки расширенных возможностей восприятия (SDK и API).
3. Благодаря открытой модульной структуре и интерфейсам, поддерживается установка модулей RTK, 5G, хостов ИИ, периферийных процессоров и различных датчиков.
4. Оснащен лидаром и камерой глубины, что позволяет углубленно развивать передовые возможности восприятия, такие как автономная навигация, автоматическая остановка и объезд препятствий, визуальное позиционирование и реконструкция окружающей среды.
Увеличение крутящего момента в суставах на 50%: мощная сила для движений.
Разработанные нами модули привода шарниров с высоким крутящим моментом отличаются сверхвысокой плотностью крутящего момента, полосой пропускания и эффективностью передачи заднего хода.
Увеличение максимальной полезной нагрузки при ходьбе на 1,40%.
2. Почти вдвое увеличилась выносливость при движении, обеспечивая непрерывное движение в течение 90 минут и дальность действия 5 км.
Трехкратное увеличение вычислительной мощности системы управления промышленного класса
Внедрение инерциального измерительного блока промышленного класса для всестороннего повышения стабильности и вычислительной мощности.
1. Первое представление промышленной системы управления в реальном времени с глубоко оптимизированным ядром.
2. Общая вычислительная мощность увеличилась почти в 3 раза.
3. Высокая скорость передачи данных в реальном времени и частота управления до 1 кГц.
Полностью модернизированная система взаимодействия человека и машины.
1. Улучшена производительность передачи изображений в реальном времени с первого просмотра и уменьшена задержка.
2. Добавлено интерактивное управление языком, позволяющее пользователям получать информацию о различных состояниях четвероногого робота в режиме реального времени.
3. Более безопасные и разнообразные движения, основанные на восприятии реальности.
4. Поддержка функций остановки, распознавания и слежения за препятствиями спереди и сзади, предотвращения столкновений спереди, автономной навигации и других функций.
Технические параметры
| 1. Аппаратная платформа | |
| Размеры стояния | Длина 610 мм ± 10 мм. Ширина 370 мм ± 10 мм. Высота 445 мм ± 10 мм |
| Размер в лежачем положении | Длина 680 мм ± 10 мм. Ширина 370 мм ± 10 мм. Высота 175 мм ± 10 мм |
| Общий вес (с батареей) | приблизительно 12,2 кг |
| Выносливость без нагрузки | 1,5–2 часа, дальность действия: 4 км |
| Робот использует алгоритм управления полной силой для поддержания равновесия. Он способен осуществлять 360-градусное бесконтактное 3D-измерение силы в стопе без использования датчиков давления на подошву, что обеспечивает низкий износ стопы и низкие затраты на техническое обслуживание. | |
| Материал | Бедра: алюминиевый сплав; хвостовики: высокопрочный композитный пластик; Отверстия: амортизирующая, противоскользящая и износостойкая резина. |
| батарея | Оснащен подключаемым литий-ионным аккумулятором; емкость аккумулятора ≥4400 мАч, номинальная мощность ≥126,7 Вт·ч; время зарядки: 40 мин ~ 1 ч. |
| Глубина резкости | Общее число степеней свободы (DOF): 12; число степеней свободы на каждую ногу: 3. |
| модуль соединения | Используется интегрированный модуль шарнирного соединения с внешним диаметром ≤76 мм, состоящий из двигателя с высоким крутящим моментом, высокоточного редуктора, абсолютного энкодера и датчика температуры. |
| Встроенный выход питания (5 В/12 В/24 В) и коммуникационные интерфейсы (Ethernet/WiFi) для удобной дальнейшей разработки. | |
| режимы защиты | плавная аварийная остановка, сигнализация низкого напряжения, сигнализация перегрева. |
| 2. Управление движением |
| Используется инерциальный датчик промышленного класса; разрешение акселерометра до 0,09 мг, разрешение гироскопа до 0,004°/с. |
| Частота управления шиной связи: 1 кГц. |
| Обеспечивает устойчивую походку и быструю походку. |
| Подходит для различных типов передвижения, включая подъем по лестнице, склонам, ползание; максимальный угол наклона при подъеме: 40° (в зависимости от материала склона); максимальная высота непрерывной лестницы: 15 см; адаптируется к бетонным дорогам, гравийным дорогам и т. д. |
| Полезная нагрузка при непрерывной ходьбе: до 4,5 кг. |
| Поддерживает пошаговое перемещение, движение вперед/назад/влево/вправо, вращение влево/вправо. |
| Предлагает различные демонстрационные действия: прыжок вперед, прыжок с поворотом, лунная походка и т. д.; максимальная дальность прыжка вперед: 50 см. |
| Способствует развитию других высокоэффективных походок и движений. |
| 3. Интеллектуальное восприятие |
| Широкоугольная камера*1: горизонтальный угол обзора 130°; 1920×1080@30fps; антибликовое покрытие, отсутствие искажений; поддерживает разработку алгоритмов распознавания и отслеживания человеческого тела. |
| ультразвуковые радары*2: поддержка разработки алгоритмов обнаружения расстояния и остановки препятствий. |
| Оборудован системой предотвращения столкновений спереди и сзади. |
| 4. Вторичное развитие |
| Предоставляет модель робота, SDK и API для управления движением, демонстрационный пример разработки системы управления движением, а также подробные руководства по вторичной разработке. |
| Предоставляет программные интерфейсы для разработки систем распознавания образов с подробными руководствами пользователя и разработчика; встроенная система ROS для быстрой вторичной разработки. |
Введение в компанию
В 2008 году в Пекине была основана компания Beijing Hewei Yongtai Technology Co., LTD. Она специализируется на разработке и эксплуатации специализированного оборудования для обеспечения безопасности, в основном для нужд правоохранительных органов, вооруженной полиции, армии, таможни и других ведомств национальной безопасности.
В 2010 году в провинции Гуаннань была основана компания Jiangsu Hewei Police Equipment Manufacturing Co., LTD. Занимая площадь в 9000 квадратных метров, включающую производственные и офисные помещения, компания ставит перед собой цель создать первоклассную научно-исследовательскую базу по разработке специального защитного оборудования в Китае.
В 2015 году в Шэньчжэне был создан военно-полицейский научно-исследовательский центр, специализирующийся на разработке специального защитного снаряжения, и с тех пор было разработано более 200 видов профессионального защитного оборудования.






Зарубежные выставки


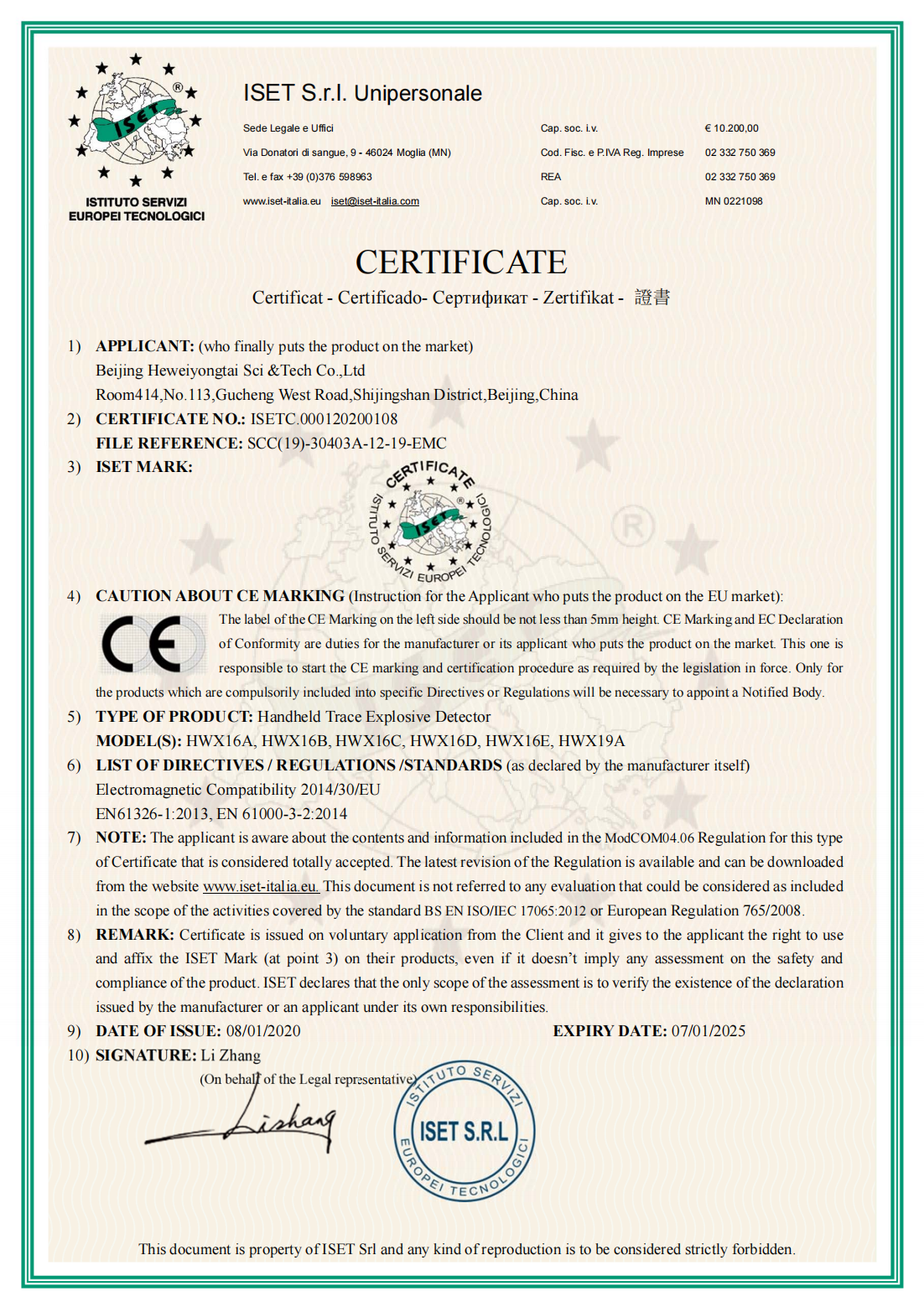
Сертификаты

Компания Beijing Heweiyongtai Sci & Tech Co., Ltd. является ведущим поставщиком решений в области обезвреживания взрывных устройств и обеспечения безопасности. Весь наш персонал состоит из квалифицированных технических и управленческих специалистов, которые обеспечат вам качественное обслуживание.
Вся продукция имеет национальные профессиональные протоколы испытаний и сертификаты соответствия, поэтому вы можете смело заказывать нашу продукцию.
Строгий контроль качества обеспечивает длительный срок службы продукции и безопасность работы оператора.
Обладая более чем 10-летним опытом работы в отрасли по производству средств обезвреживания взрывных устройств, антитеррористического оборудования, разведывательных приборов и т.д.
Мы профессионально обслуживаем клиентов из более чем 60 стран мира.
Для большинства товаров нет минимального объема заказа, быстрая доставка товаров, изготовленных на заказ.




